![]()
深圳北理莫斯科大学 北极熊战队 2025 赛季哨兵导航仿真/实车包
![]()
Bilibili: 谁说在家不能调车!?更适合新手宝宝的 RM 导航仿真
| NAV2 | 动态避障 |
|---|---|
 |
 |
本项目基于 NAV2 导航框架 并参考学习了 autonomous_exploration_development_environment 的设计。
-
关于坐标变换:
本项目大幅优化了坐标变换逻辑,考虑雷达原点
lidar_odom与 底盘原点odom之间的隐式变换。mid360 倾斜侧放在底盘上,使用 point_lio 里程计,small_gicp 重定位,loam_interface 会将 point_lio 输出的
/cloud_registered从lidar_odom系转换到odom系,sensor_scan_generation 将odom系的点云转换到front_mid360系,并发布变换odom -> chassis。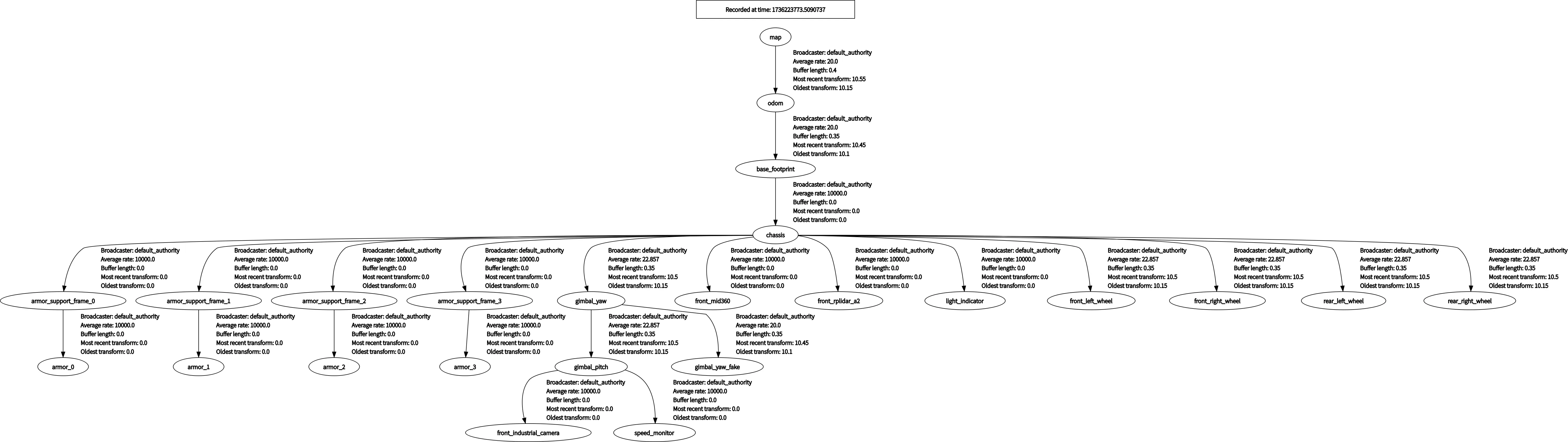
-
关于路径规划:
使用 NAV2 默认的 Global Planner 作为全局路径规划器,pb_omni_pid_pursuit_controller 作为路径跟踪器。
-
namespace:
为了后续拓展多机器人,本项目引入 namespace 的设计,与 ROS 相关的 node, topic, action 等都加入了 namespace 前缀。如需查看 tf tree,请使用命令
ros2 run rqt_tf_tree rqt_tf_tree --ros-args -r /tf:=tf -r /tf_static:=tf_static -r __ns:=/red_standard_robot1 -
LiDAR:
Livox mid360 倾斜侧放在底盘上。
注:仿真环境中,实际上 point pattern 为 velodyne 样式的机械式扫描。此外,由于仿真器中输出的 PointCloud 缺少部分 field,导致 point_lio 无法正常估计状态,故仿真器输出的点云经过 ign_sim_pointcloud_tool 处理添加
timefield。 -
文件结构
. ├── fake_vel_transform # 虚拟速度参考坐标系,以应对云台扫描模式自旋,详见子仓库 README ├── ign_sim_pointcloud_tool # 仿真器点云处理工具 ├── livox_ros_driver2 # Livox 驱动 ├── loam_interface # point_lio 等里程计算法接口 ├── pb_teleop_twist_joy # 手柄控制 ├── pb2025_nav_bringup # 启动文件 ├── pb2025_sentry_nav # 本仓库功能包描述文件 ├── pb_omni_pid_pursuit_controller # 路径跟踪控制器 ├── point_lio # 里程计 ├── sensor_scan_generation # 点云相关坐标变换 ├── small_gicp_relocalization # 重定位 └── terrain_analysis # 分割出非地面障碍物点云
-
Ubuntu 22.04
-
ROS: Humble
-
配套仿真包(Option):rmu_gazebo_simulator
-
Install small_icp:
sudo apt install -y libeigen3-dev libomp-dev git clone https://github.com/koide3/small_gicp.git cd small_gicp mkdir build && cd build cmake .. -DCMAKE_BUILD_TYPE=Release && make -j sudo make install
mkdir -p ~/ros_ws
cd ~/ros_wsgit clone --recursive https://github.com/SMBU-PolarBear-Robotics-Team/pb2025_sentry_nav.git src/pb2025_sentry_nav下载先验点云:
先验点云用于 point_lio 和 small_gicp,由于点云文件体积较大,故不存储在 git 中,请前往 FlowUs 下载。
当前 point_lio with prior_pcd 在大场景的效果并不好,比不带先验点云更容易飘,待 Debug 优化
rosdep install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -ycolcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=ReleaseNote
推荐使用 --symlink-install 选项来构建你的工作空间,因为 pb2025_sentry_nav 广泛使用了 launch.py 文件和 YAML 文件。这个构建参数会为那些非编译的源文件使用符号链接,这意味着当你调整参数文件时,不需要反复重建,只需要重新启动即可。
可使用以下命令启动,在 RViz 中使用 Nav2 Goal 插件发布目标点。
单机器人 :
ros2 launch pb2025_nav_bringup rm_sentry_simulation_launch.py \
world:=rmuc_2025 \
slam:=False多机器人 (实验性功能) :
当前指定的初始位姿实际上是无效的。TODO: 加入 map -> odom 的变换和初始化
ros2 launch pb2025_nav_bringup rm_multi_sentry_simulation_launch.py \
world:=rmul_2024 \
robots:=" \
red_standard_robot1={x: 0.0, y: 0.0, yaw: 0.0}; \
blue_standard_robot1={x: 5.6, y: 1.4, yaw: 3.14}; \
"注意修改 world 参数为实际地图的名称
ros2 launch pb2025_nav_bringup rm_sentry_reality_launch.py \
world:=<YOUR_WORLD_NAME> \
slam:=False \
use_robot_state_pub:=True启动参数在仿真和实车中大部分是通用的。以下是所有启动参数表格的图例。
| 符号 | 含义 |
|---|---|
| 🤖 | 适用于实车 |
| 🖥️ | 适用于仿真 |
| 可用性 | 参数 | 描述 | 类型 | 默认值 |
|---|---|---|---|---|
| 🤖 🖥️ | namespace |
顶级命名空间 | string | "red_standard_robot1" |
| 🤖🖥️ | use_sim_time |
如果为 True,则使用仿真(Gazebo)时钟 | bool | 仿真: True; 实车: False |
| 🤖 🖥️ | slam |
是否启用建图模式。如果为 True,则禁用 small_gicp 并发送静态 tf(map->odom)。然后自动保存 pcd 文件到 ./point_lio/PCD/ | bool | False |
| 🤖 🖥️ | world |
在仿真模式,可用选项为 rmul_2024 或 rmuc_2024 或 rmul_2025 或 rmuc_2025 |
string | "rmuc_2025" |
在实车模式,world 参数名称与栅格地图和先验点云图的文件名称相同 |
string | "" | ||
| 🤖 🖥️ | map |
要加载的地图文件的完整路径。默认路径自动基于 world 参数构建 |
string | 仿真: rmuc_2025.yaml; 实车: 自动填充 |
| 🤖 🖥️ | prior_pcd_file |
要加载的先验 pcd 文件的完整路径。默认路径自动基于 world 参数构建 |
string | 仿真: rmuc_2025.pcd; 实车: 自动填充 |
| 🤖 🖥️ | params_file |
用于所有启动节点的 ROS2 参数文件的完整路径 | string | 仿真: nav2_params.yaml; 实车: nav2_params.yaml |
| 🤖🖥️ | rviz_config_file |
要使用的 RViz 配置文件的完整路径 | string | nav2_default_view.rviz |
| 🤖 🖥️ | autostart |
自动启动 nav2 栈 | bool | True |
| 🤖 🖥️ | use_composition |
是否使用 Composable Node 形式启动 | bool | True |
| 🤖 🖥️ | use_respawn |
如果节点崩溃,是否重新启动。本参数仅 use_composition:=False 时有效 |
bool | False |
| 🤖🖥️ | use_rviz |
是否启动 RViz | bool | True |
| 🤖 | use_robot_state_pub |
是 是否使用 robot_state_publisher 发布机器人的 TF 信息 1. 在仿真中,由于支持的 Gazebo 仿真器已经发布了机器人的 TF 信息,因此不需要再次发布。 2. 在实车中,推荐使用独立的包发布机器人的 TF 信息。例如, gimbal_yaw 和 gimbal_pitch 关节位姿由串口模块 standard_robot_pp_ros2 提供,此时应将 use_robot_state_pub 设置为 False。 如果没有完整的机器人系统或仅测试导航模块(此仓库)时,可将 use_robot_state_pub 设置为 True。此时,导航模块将发布静态的机器人关节位姿数据以维护 TF 树。 注意:需额外克隆并编译 pb2025_robot_description |
bool | False |
Tip
关于本项目更多细节与实车部署指南,请前往 Wiki
默认情况下,PS4 手柄控制已开启。键位映射关系详见 nav2_params.yaml 中的 teleop_twist_joy_node 部分。
- 优化 pb_omni_pid_pursuit_controller,加入对高曲率路径的速度限制处理