class: center, middle
Gerard Escudero, 2020

.footnote[source]
class: left, middle, inverse
-
.cyan[Introduction]
-
Finite State Machines
-
Decision Trees
-
Behaviour Trees
-
Planning Systems
-
References
.center[ ]
]
.footnote[.red[(Millington, 2019)]]
.cols5050[ .col1[
-
.blue[Input]: World Knowledge
-
.blue[Output]: Action
-
.blue[Important rule]:
Decision Making should NOT execute every frame! -
Main algorithms:
- Finite State Machines
- Behaviour Trees
- Goal Oriented Action Planning
 .small[GOAP]
]
.col2[
.small[GOAP]
]
.col2[

.small[FSM]

.small[BT]
]]
class: left, middle, inverse
-
.brown[Introduction]
-
.cyan[Finite State Machines]
-
.cyan[Code (delegates)]
-
Visual Scripting
-
Hierarchical FSM
-
-
Decision Trees
-
Behaviour Trees
-
Planning Systems
-
References
Example:
using UnityEngine;
using System.Collections;
public class WaitForSecondsExample : MonoBehaviour {
void Start() {
StartCoroutine(“Example”);
}
IEnumerator Example() {
Debug.Log(Time.time);
yield return new WaitForSeconds(5);
Debug.Log(Time.time);
}
}-
StartCoroutine: type of asynchronous "functions" -
IEnumerator: returning type -
yield: stops execution until something happens
assigning functions to variables
Example:
public class DelegateScript : MonoBehaviour {
delegate void MyDelegate(int num);
MyDelegate myDelegate;
void Start () {
myDelegate = PrintNum;
myDelegate(50);
myDelegate = DoubleNum;
myDelegate(50);
}
void PrintNum(int num) {
Debug.Log(num);
}
void DoubleNum(int num) {
Debug.Log(num * 2);
}
}.center[ ]
]
.blue[Task]: FSM for the robber:
.center[ ]
]
.blue[Code template]:
public class FSM : MonoBehaviour
{
...
private WaitForSeconds wait = new WaitForSeconds(0.05f); // 1 / 20
delegate IEnumerator State();
private State state;
IEnumerator Start()
{
...
state = Wander;
while (enabled)
yield return StartCoroutine(state());
}
IEnumerator Wander()
{
Debug.Log("Wander state");
...
}
}-
Coroutine that executes 20 times per second and goes forever
-
Explicit every state change with
Debub.Log -
First behaviour is slowly .blue[wander]
-
When the cop walks away from the treasure he has to .blue[approach] quickly to steal it
-
If the cop comes back he returns to .blue[wander] slowly and so on
-
If the robbery is successful (the treasure must disappear), he begins to permanently .blue[hide] in the obstacle closest to the cop
.blue[solution]: view.red[*] / download
- Watch the videos (5mn): Killzone 2 Review about AI & F.E.A.R. 2 - A.I.
.footnote[.red[*] made with .red[hightlighting]]
class: left, middle, inverse
-
.brown[Introduction]
-
.cyan[Finite State Machines]
-
.brown[Code (delegates)]
-
.cyan[Visual Scripting]
-
Hierarchical FSM
-
-
Decision Trees
-
Behaviour Trees
-
Planning Systems
-
References

-
Visual editors helps handling complex behaviours
-
Separates coders from game designers
-
Many options:
- CryEngine’s flowgraph
- Unreal Kismet / Blueprint
- Unity PlayMaker
- ...
-
Includes FSM, hierarchical FSM and Behavior Trees
-
Decent documentation
-
It allows the creation of new actions

- Wander State: view.red[*] / download
- Approaching State: view.red[*] / download
- Hiding State: view.red[*] / download
- BlackBoard: view.red[*] / download
.footnote[.red[*] made with .red[hightlighting]]
class: left, middle, inverse
-
.brown[Introduction]
-
.cyan[Finite State Machines]
-
.brown[Code (delegates)]
-
.brown[Visual Scripting]
-
.cyan[Hierarchical FSM]
-
-
Decision Trees
-
Behaviour Trees
-
Planning Systems
-
References
.blue[Complex Behaviours]:

.footnote[.red[source]]


class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.cyan[Decision Trees]
-
Behaviour Trees
-
Planning Systems
-
References

-
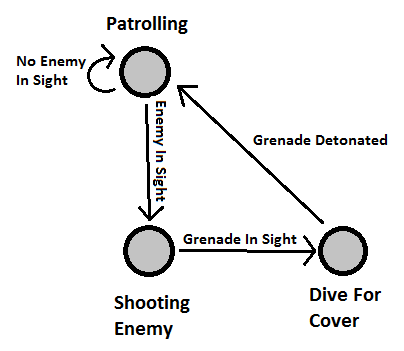
FSM: .blue[States] (with Actions) & .blue[Transitions] (with conditions)
-
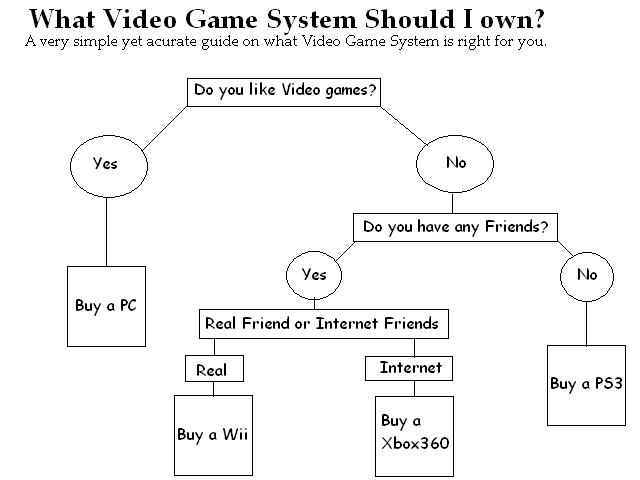
DTs: .blue[Conditions] (tree nodes) & .blue[Actions] (leafs).
-
It has no notion of state; we have to go through the whole tree every time we run it.
-
How could we use decision trees in games?
- NPCs Dialogs
- Bosses that switch state every % HP
- … ?
-
Decision trees can be generated automatically.
We will see this in the topic of machine learning.

class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.cyan[Behaviour Trees]
-
.cyan[Design]
-
NodeCanvas
-
Behaviour Bricks
-
-
Planning Systems
-
References
.cols5050[ .col1[
-
Sort of visual programming for AI behaviour (Isla, 2005)
- Reusability & modularity
- Major engines: unreal, cryengine, unity
-
Behavior Tree combine both:
- Decision trees: execute all at once
- State machines: current state implicit
- the execution stays in one of the nodes
-
.blue[Designing Trees is a hard task!]
Reference: Behavior trees for AI: How they work] .col2[ ]]
]]

- All should return Running, Success or Failure
- They can take a while!
- Most of the time they will be leaf nodes

- All should return True or False
- Conditions normally refer to the blackboard for questioning the world state

- All should return True or False
- They iterate all childs from left to right in a specific fashion:
- .blue[Sequence] (AND): A node that executes all its children until one fails
- .blue[Selector] (OR): A node that executes all its children until one succeeds
- .blue[Parallel] (Concurrent AND): Execute all its children at the same time until one fails
- .blue[Random Sequence or Selector] (with %?): Same as sequence or selector but randomly
- .blue[Priority Sequence or Selector] (with %#): Same as sequence or selector but follow a mutable priority

- All should return Running, Success or Failure
- Add enormous flexibility and power to the tree execution flow
- They modify one specific child in some fashion:
- .blue[Inverter] (NOT): invert the result of the child node
- .blue[Repeater] (until fail, N or infinite): basically repeat the child node until fail or N times
- .blue[Wait until] (seconds, condition, etc.): basically a generic delay

.center[ ]
]
.footnote[Behavior trees for AI: How they work]
--
.center[ ]
]
.center[ ]
]
.footnote[Behavior trees for AI: How they work]
- Exercise / homework:
template for design BTs / a solution
class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.cyan[Behaviour Trees]
-
.brown[Design]
-
.cyan[NodeCanvas]
-
Behaviour Bricks
-
-
Planning Systems
-
References
- Add Component - Behaviour Tree Owner (handout)






.footnote[.blue[Need of Success and/or Failure States]]
class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.cyan[Behaviour Trees]
-
.brown[Design]
-
.brown[NodeCanvas]
-
.cyan[Behaviour Bricks]
-
-
Planning Systems
-
References
.blue[ToSteal] behaviour tree:
.cols5050[ .col1[ .blue[Starting]:
- Handout
- Editor:
Window - Behavior Bricks - Editor - Robber:
Add Component - Behavior executor component
.blue[BlackBoard / properties]:
MoveToRandomPosition: FloorMoveToGameObject: Treasure
.blue[Conditions]:
- Custom conditions / download
]
.col2[
 ]]
]]

.blue[ToSteal] behaviour tree:

.blue[ToSteal] behaviour tree:
.blue[BlackBoard / properties]:
IsTargetClose: Treasure, 2ToSteal: Floor, TreasureSetActive: false, TresureMoveToPosition: hide
.blue[Actions]:
class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.brown[Behaviour Trees]
-
.cyan[Planning Systems]
-
.cyan[Goal Oriented Behaviour]
-
Goal Oriented Action Planning
-
AI Planner
-
-
References
-
How to achieve goals
$\rightarrow$ AI -
Exs: FSM, DT, BT
-
World behaviour
$+$ goals$\rightarrow$ AI -
AI decides how to achieve its goals
-
Ex: Planners
- FEAR, Fallout 3, Total War, Deus Ex: Human Revolution, Shadow of Mordor, Tomb Raider
-
each agent can have many active, and they could change
-
try to fulfill its goals or reduce its .blue[insistence] (importance or priority as a number)
-
examples: eat, drink, kill enemy, regenerate health, etc.
-
atomic behaviours that fulfill a requirement
-
combination of positive and negative effects
Ex: “play game console” increases happiness but decreases energy -
environment can generate or activate new available actions (.blue[smart objects])
.footnote[.red[(Millington, 2019)]]
Goal: Eat = 4
Goal: Sleep = 3
Action: Get-Raw-Food (Eat − 3)
Action: Get-Snack (Eat − 2)
Action: Sleep-In-Bed (Sleep − 4)
Action: Sleep-On-Sofa (Sleep − 2)
-
.blue[heuristic] needed: most pressing goal, random...
-
.blue[$+$] fast, simple
-
.blue[$-$] side effects, no timing information
.footnote[.red[(Millington, 2019)]]
--
Goal: Eat = 4
Goal: Bathroom = 3
Action: Drink-Soda (Eat − 2; Bathroom + 3)
Action: Visit-Bathroom (Bathroom − 4)
It is an energy metric to minimize:
-
Sum of insistence values of all goals
-
Sum of square values: it accentuates high values
Goal: Eat = 4
Goal: Bathroom = 3
Action: Drink-Soda (Eat − 2; Bathroom + 2)
after: Eat = 2, Bathroom = 5: Discontentment = 29
Action: Visit-Bathroom (Bathroom − 4)
after: Eat = 4, Bathroom = 0: Discontentment = 16
Solution: Visit-Bathroom
.footnote[.red[(Millington, 2019)]]
Goal: Eat = 4 changing at + 4 per hour
Goal: Bathroom = 3 changing at + 2 per hour
Action: Eat-Snack (Eat − 2) 15 minutes
after: Eat = 2, Bathroom = 3.5: Discontentment = 16.25
Action: Eat-Main-Meal (Eat − 4) 1 hour
after: Eat = 0, Bathroom = 5: Discontentment = 25
Action: Visit-Bathroom (Bathroom − 4) 15 minutes
after: Eat = 5, Bathroom = 0: Discontentment = 25
Solution: Eat-Snack
.footnote[.red[(Millington, 2019)]]
Goal: Eat = 4 changing at + 4 per hour
Goal: Bathroom = 3 changing at + 2 per hour
Action: Eat-Snack (Eat − 2) 15 minutes
Action: Eat-Main-Meal (Eat − 4) 1 hour
Action: Visit-Bathroom (Bathroom − 4) 15 minutes

class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.brown[Behaviour Trees]
-
.cyan[Planning Systems]
-
.brown[Goal Oriented Behaviour]
-
.cyan[Goal Oriented Action Planning]
-
AI Planner
-
-
References
- Mage character
- 5 charges in its wand
- need for healing
- an ogre approaching him aggressively
- plan
Goal: Heal = 4
Goal: Kill-Ogre = 3
Action: Fireball (Kill-Ogre − 2) 3 charges
Action: Lesser-Healing (Heal − 2) 2 charges
Action: Greater-Healing (Heal − 4) 3 charges
Best combination: Lesser-Healing + Fireball
GOB solution: Greate-Healing
.blue[GOB is limited in its prediction, the situation needs to go some steps ahead!]
.footnote[.red[(Millington, 2019)]]
-
.blue[preconditions] for chaining actions
-
.blue[states] for satisfying preconditions
-
.blue[search algorithm] for selecting "best" branches
(each goal is the root of a tree)
-
.blue[BFS]
increasing the number of actions and goals it becomes quickly inefficient -
.blue[A*]
perhaps distance heuristic cannot be formulated -
.blue[Dijkstra]: usual solution
Goal: Heal = 4
Goal: Kill-Ogre = 3
Action: Fireball (Kill-Ogre − 2) 3 charges
Action: Lesser-Healing (Heal − 2) 2 charges
Action: Greater-Healing (Heal − 4) 3 charges


.blue[First approach]:

class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.brown[Behaviour Trees]
-
.cyan[Planning Systems]
-
.brown[Goal Oriented Behaviour]
-
.brown[Goal Oriented Action Planning]
-
.cyan[AI Planner]
-
-
References
The AI Planner package can generate optimal plans for use in agent AI

-
.red[Reference]
-
it contains a plan visualizer
.cols5050[ .col1[
Create - AI - Trait- fundamental data (game state)
- quality of objects (components)
- contains attributes
- .blue[Valuable] (Treasure)
- .blue[Cop]:
farAway (false) - .blue[Robber]:
ready2steal (false) stolen (false)
- for .blue[Enum Definition] in traits
]
.col2[


 ]]
]]
.cols5050[ .col1[
Create - AI - Planner - Action Definition- planner potential decisions
- executes nothing
- Properties:
name, parameters,
preconditions, effects,
cost / reward
.blue[Wander]
- parameters: cop, robber, treasure
- effects:
farAway = true] .col2[ ]]
]]

.cols5050[ .col1[
.blue[Approach]
- parameters: cop, robber, treasure
- precondition:
farAway == true - effect:
ready2steal = true
.blue[Steal]
- parameters: robber, treasure
- precondition:
ready2steal == true - effect:
stolen = true,
treasureremoved ] .col2[ ]]
]]

.cols5050[ .col1[
Create - AI - Planner - Plan Definition
 ]
.col2[
]
.col2[
Create - AI - Planner - State Termination Definition
 ]]
]]
.cols5050[ .col1[
-
Add Component - TraitComponentto the GameObjects -
Add Component - DecisionController
to the AI agent GameObject
-
Add the plan definition
-
Add the world objects
with traits
- Create and link the
callbacks...
]
.col2[
 ]]
]]
.cols5050[ .col1[
-
ActionDefinitions components are .blue[not] applied to the scene
-
It is the Action Callbacks goal
-
.blue[Coroutine] is the choice for actions that execute over multiple frames
]
.col2[
 ]]
]]
.footnote[.red[*] made with .red[hightlighting]]
Window - AI - Plan Visualizer
.center[ ]
]
Example: .blue[Non linear behaviour of Robber]
-
Go to
Assets - Planner - Traits -
Create - Assembly Definition -
Inspector - Version Defines - Resource - generated.ai.planner.staterepresentation
-
Approach:
Cost/Reward: -1 -
Steal:
Cost/Reward: 5 -
Wander:
Cost/Reward: -2
.cols5050[ .col1[
- Approach:
Method - roberGO
Next State Update
- Robber video
]
.col2[
 ]]
]]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
.footnote[.red[*] made with .red[hightlighting]]
class: left, middle, inverse
-
.brown[Introduction]
-
.brown[Finite State Machines]
-
.brown[Decision Trees]
-
.brown[Behaviour Trees]
-
.brown[Planning Systems]
-
.cyan[References]
-
Ian Millington. AI for Games (3rd edition). CRC Press, 2019.
-
Penny de Byl. Artificial Intelligence for Beginners. Unity Course.
-
Chris Simpson. Behavior trees for AI: How they work. Gamasutra, 2014.
-
Unity Technologies. AI Planner. 2020.
-
Damian Isla. Handling Complexity in the Halo 2 AI. GDC, 2005.
-
Ricard Pillosu. Previous year slides of the AI course, 2019.