A wrapper for the pigpio C library to enable fast GPIO, PWM, servo control, state change notification and interrupt handling with Node.js on the Raspberry Pi Zero, 1, 2 or 3.
pigpio supports Node.js versions 0.10, 0.12, 4, 5, 6, 7, 8 and 9.
- Digital IO
- Up to 2.1 million digital reads per second *)
- Up to 2.3 million digital writes per second *)
- PWM on any of GPIOs 0 through 31
- Multiple frequencies and duty cycle ranges supported
- Servo control on any of GPIOs 0 through 31
- Jitter free
- Alerts when any of GPIOs 0 through 31 change state
- The time of the state change is available accurate to a few microseconds
- Notification streams for monitoring state changes on any of GPIOs 0 through 31 concurrently
- The time of the state changes are available accurate to a few microseconds
- Low latency interrupt handlers
- Handle up to 20000 interrupts per second *)
- Read or write up to 32 GPIOs as one operation with banked GPIO
- Trigger pulse generation
- Pull up/down resistor configuration
*) On a Raspberry Pi 3 Model B V1.2 running at 1.2 GHz (Performance)
The pigpio Node.js package requires the pigpio C library V41 or higher.
Raspbian Jessie 2016-05-10 or newer comes with the pigpio C library pre-installed so it need not be manually installed.
Raspbian Jessie Lite 2016-05-10 or newer does not come with the pigpio C library pre-installed so it must be manually installed with the following commands:
sudo apt-get update
sudo apt-get install pigpio
The pigpio C library contains a number of utilities. One of these utilities is pigpiod which launches the pigpio C library as a daemon. This utility should not be used as the pigpio Node.js package uses the C library directly.
Installation instructions for the pigpio C library on versions of Raspbian prior to 2016-05-10 can be found here.
npm install pigpio
Assume there's an LED connected to GPIO17 (pin 11) and a momentary push button connected to GPIO4 (pin 7).
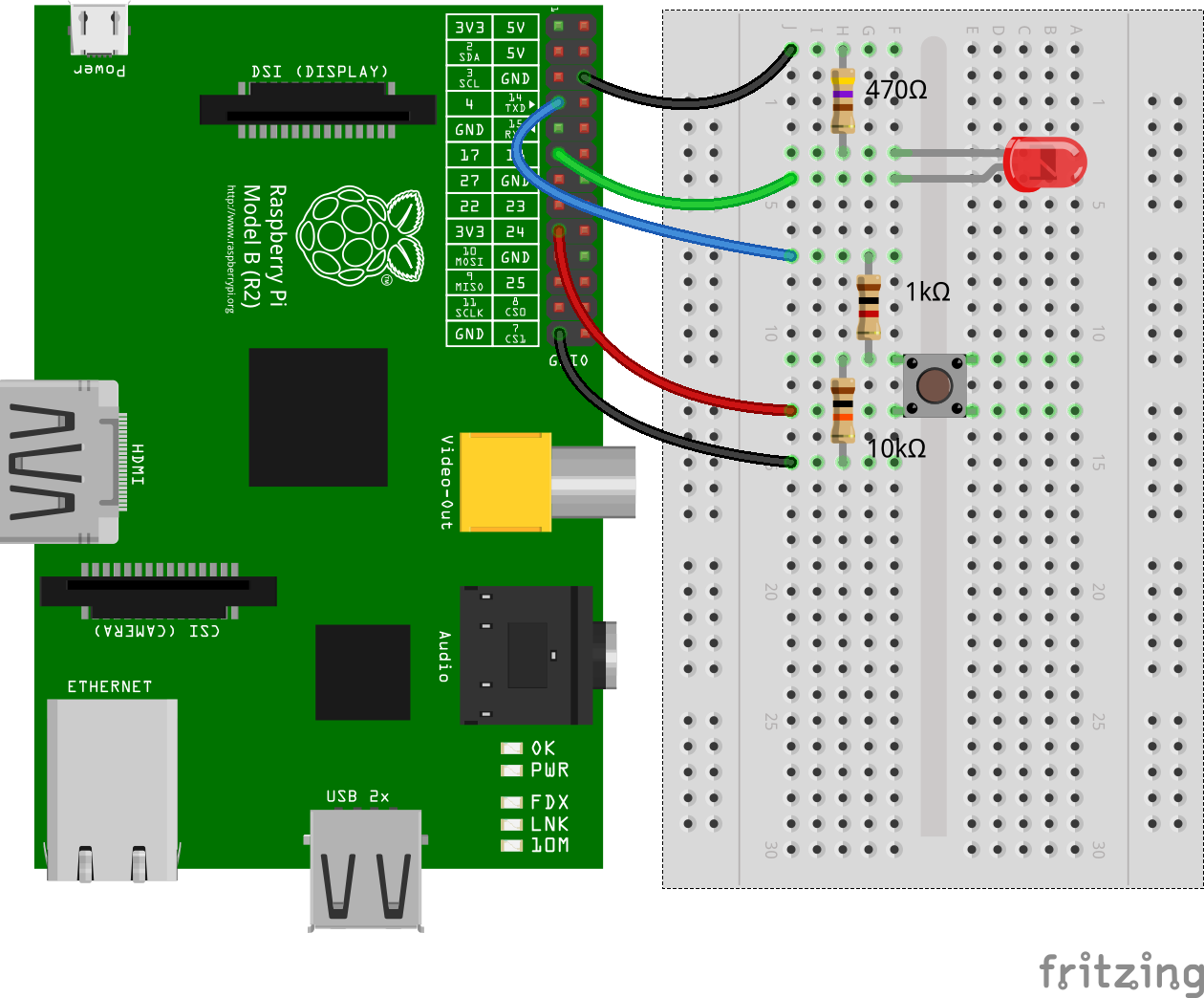
Use PWM to pulse the LED connected to GPIO17 from fully off to fully on continuously.
var Gpio = require('pigpio').Gpio,
led = new Gpio(17, {mode: Gpio.OUTPUT}),
dutyCycle = 0;
setInterval(function () {
led.pwmWrite(dutyCycle);
dutyCycle += 5;
if (dutyCycle > 255) {
dutyCycle = 0;
}
}, 20);Turn the LED connected to GPIO17 on when the momentary push button connected to GPIO4 is pressed. Turn the LED off when the button is released.
var Gpio = require('pigpio').Gpio,
button = new Gpio(4, {
mode: Gpio.INPUT,
pullUpDown: Gpio.PUD_DOWN,
edge: Gpio.EITHER_EDGE
}),
led = new Gpio(17, {mode: Gpio.OUTPUT});
button.on('interrupt', function (level) {
led.digitalWrite(level);
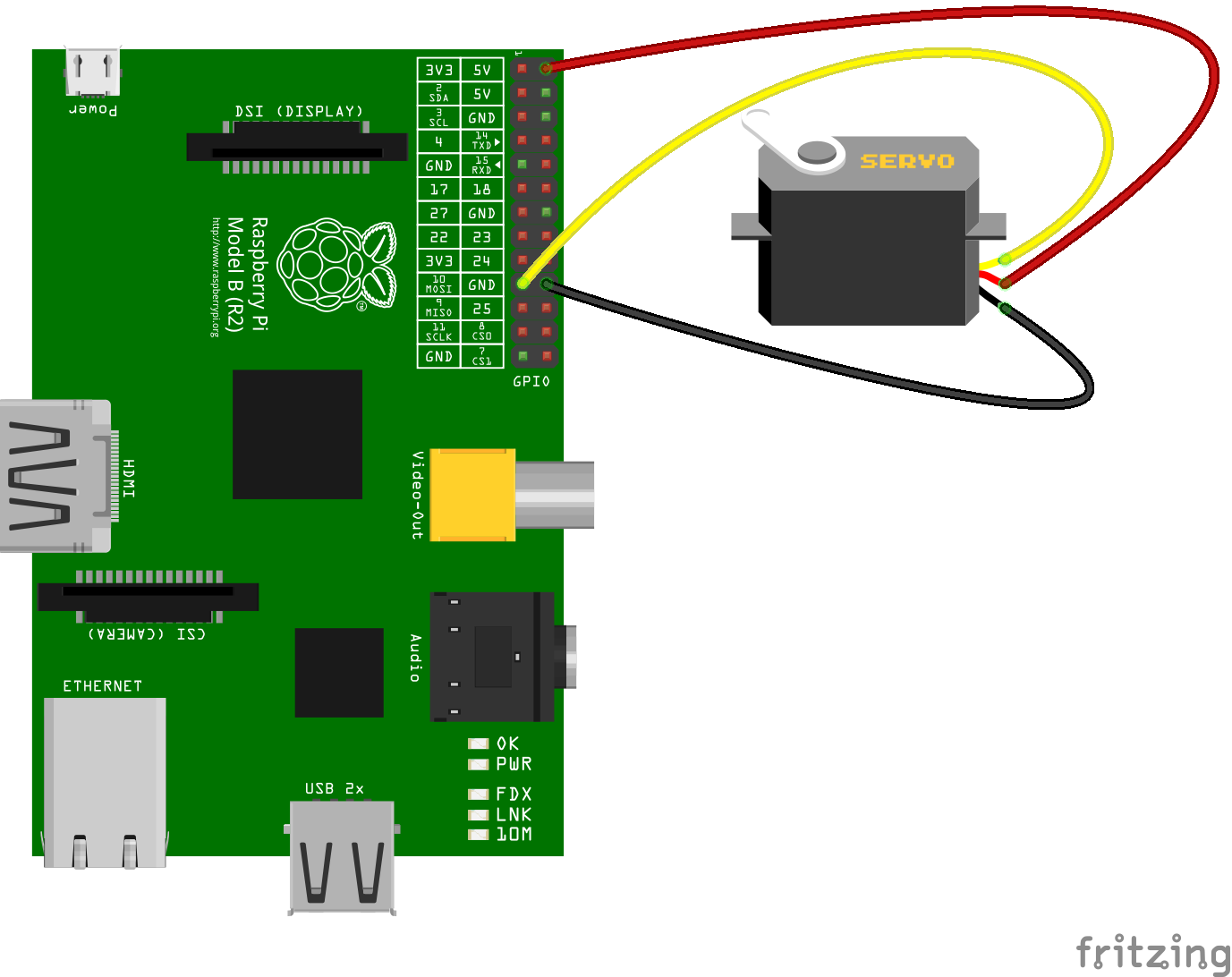
});Continuously move a servo connected to GPIO10 clockwise and anti-clockwise.
var Gpio = require('pigpio').Gpio,
motor = new Gpio(10, {mode: Gpio.OUTPUT}),
pulseWidth = 1000,
increment = 100;
setInterval(function () {
motor.servoWrite(pulseWidth);
pulseWidth += increment;
if (pulseWidth >= 2000) {
increment = -100;
} else if (pulseWidth <= 1000) {
increment = 100;
}
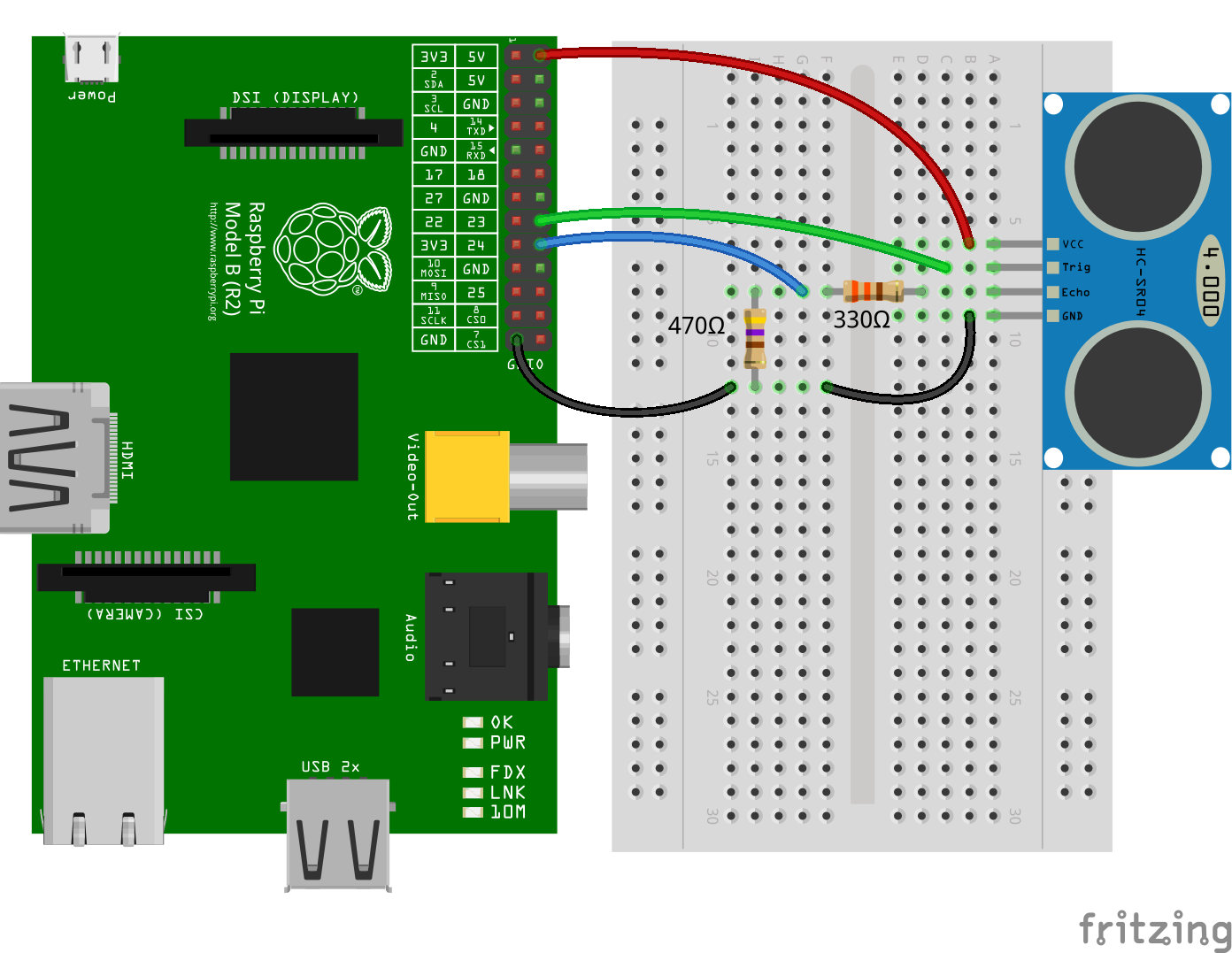
}, 1000);The trigger function can be used to generate a pulse on a GPIO and alerts can
be used to determine the time of a GPIO state change accurate to a few
microseconds. These two features can be combined to measure distance using a
HC-SR04 ultrasonic sensor.
var Gpio = require('pigpio').Gpio,
trigger = new Gpio(23, {mode: Gpio.OUTPUT}),
echo = new Gpio(24, {mode: Gpio.INPUT, alert: true});
// The number of microseconds it takes sound to travel 1cm at 20 degrees celcius
var MICROSECDONDS_PER_CM = 1e6/34321;
trigger.digitalWrite(0); // Make sure trigger is low
(function () {
var startTick;
echo.on('alert', function (level, tick) {
var endTick,
diff;
if (level == 1) {
startTick = tick;
} else {
endTick = tick;
diff = (endTick >> 0) - (startTick >> 0); // Unsigned 32 bit arithmetic
console.log(diff / 2 / MICROSECDONDS_PER_CM);
}
});
}());
// Trigger a distance measurement once per second
setInterval(function () {
trigger.trigger(10, 1); // Set trigger high for 10 microseconds
}, 1000);Alerts can be used to determine the time of a GPIO state change accurate to a
few microseconds. Typically, alerts will be used for GPIO inputs but they can
also be used for outputs. In this example, the trigger method is used to
pulse the LED connected to GPIO17 on for 15 microseconds once per second.
Alerts are used to measure the length of the pulse.
// Assumption: the LED is off when the program is started
var Gpio = require('pigpio').Gpio,
led = new Gpio(17, {
mode: Gpio.OUTPUT,
alert: true
});
(function () {
var startTick;
// Use alerts to determine how long the LED was turned on
led.on('alert', function (level, tick) {
var endTick,
diff;
if (level == 1) {
startTick = tick;
} else {
endTick = tick;
diff = (endTick >> 0) - (startTick >> 0); // Unsigned 32 bit arithmetic
console.log(diff);
}
});
}());
// Turn the LED on for 15 microseconds once per second
setInterval(function () {
led.trigger(15, 1);
}, 1000);Here's an example of the typical output to the console:
15
15
15
15
15
15
20
15
15
15
15
- Gpio - General Purpose Input Output
- GpioBank - Banked General Purpose Input Output
- Notifier - Notification Stream
- Configuration - pigpio configuration
Three of the pigpio tests are used to monitor performance:
- digital-read-performance.js - determine max. no. of digitalRead ops per second
- digital-write-performance.js - determine max. no. of digitalWrite ops per second
- isr-performance.js - determine max. no. of interrupts per second
The average of ten runs of these tests are shown in the table below.
| Name | Pi 2 | Pi 3 |
|---|---|---|
| Pi Model | Raspberry Pi 2 Model B V1.1 | Raspberry Pi 3 Model B V1.2 |
| OS | Raspbian Jessie 2016-02-09 | Raspbian Jessie 2016-02-26 |
| Kernel | 4.1.17-v7+ | 4.1.18-v7+ |
| Node.js | v5.6.0 armv7l | v5.7.0 armv7l |
| pigpio | v0.3.0 | v0.3.2 |
| pigpio C library | V45 | V47 |
| Reads per second | 1,232,588 | 2,129,221 |
| Writes per second | 1,323,039 | 2,336,157 |
| Interrupts per second | 8,881 | 20,533 |
- The pigpio Node.js package is a wrapper for the pigpio C library. A limitation of the pigpio C library is that it can only be used by a single running process.
- The pigpio C library and therefore the pigpio Node.js package requires root/sudo privileges to access hardware peripherals.
Here are a few links to other hardware specific Node.js packages that may be of interest.
- onoff - GPIO access and interrupt detection
- i2c-bus - I2C serial bus access
- spi-device - SPI serial bus access
- mcp-spi-adc - Analog to digital conversion with the MCP3002/4/8, MCP3202/4/8 and MCP3304
- pigpio-mock - A pigpio mock library for development on your local machine