喜欢这个项目吗?请考虑给 Star ⭐️ 以帮助改进!
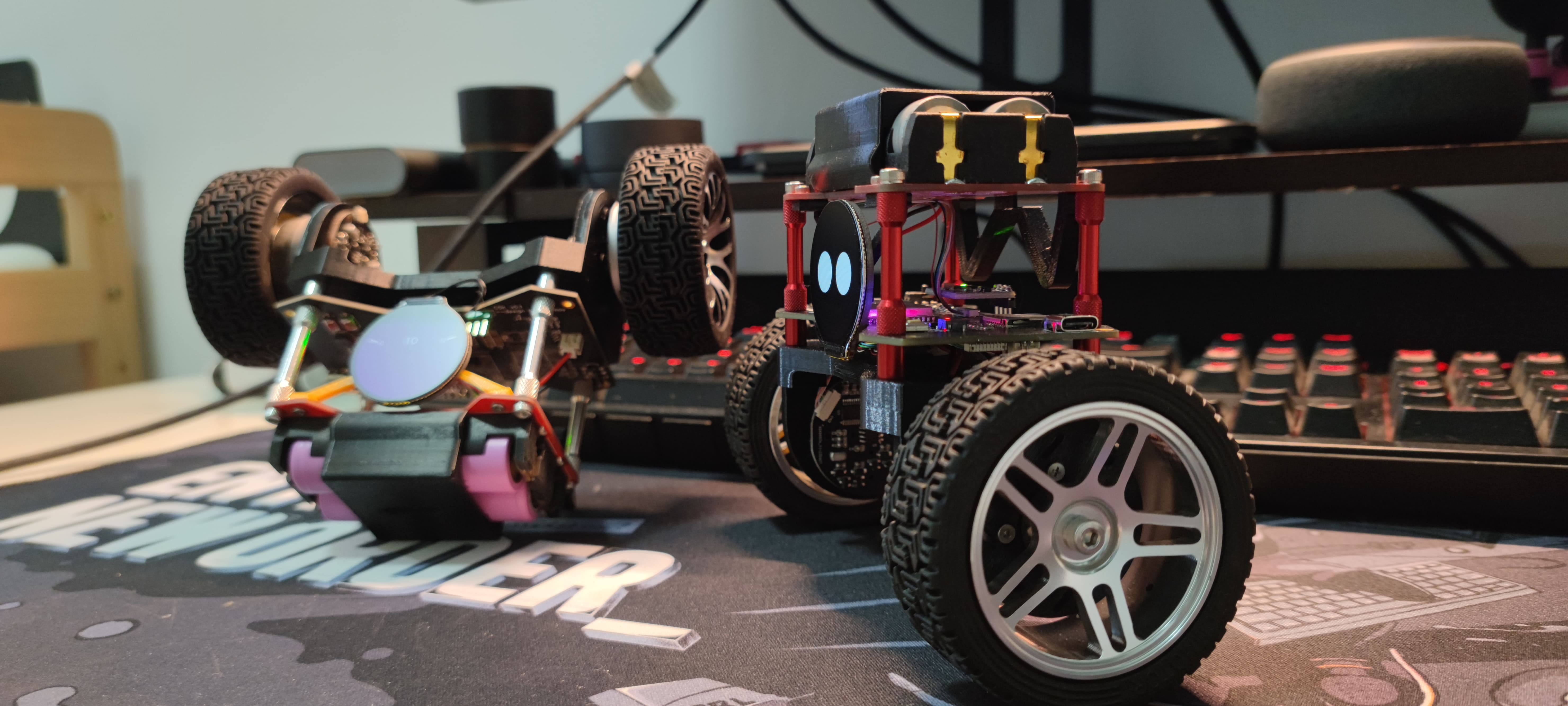
D-BOT 是一个桌面机器人(Desktop Bot),可通过 AI 精确控制,同时具备 X-Knob 的全功能。我同时更想称 D-BOT 为小探索家(Discovery Bot),它能探索这个世界,同时也是我对我自己的一次探索:第一次完整尝试 3D 建模和 PCB 设计。
D-BOT 支持的特性:
- X-Knob 原生全功能支持;
- 手柄遥控控制(蓝牙);
- 无线调参:
- 基于 SimpleFOCStudio (尝试合入到 upstream 中,但作者太忙一直没时间 review,暂时使用我 fork 的仓库)修改了上位机,通过无线网络连接;
- 在 D-BOT 端通过 WirelessTuning 库,作为胶水层无缝适配 SimpleFOC 的 monitor 库;
- 小智 AI 控制,化身 AI 机器人;
主要硬件列表:
- 4 块 PCB:主控板 + 驱动板 * 2 + 屏幕板;
- 电池板: 直接使用饭佬开源平衡车的电池板,但不用焊接任何元件;
- MCU: ESP32-S3 WROOM-1U-N16R8;
- 屏幕: 240x240 圆形 LCD GC9A01 (1.28 寸)
- 磁编码器:MT6701CT;
- 3205a 无刷直流电机(无限位);
已经上传到嘉立创开源平台:硬件开源链接
3D 结构的打印件已经上传到 Maker World : D-BOT 3D 模型,总共包含 5 个打印件:
- 车架-3205a_v1.1
- 车轮适配件_v0.2
- 电池卡扣+底座接口_v0.9
- 屏幕架_v0.4
- 支撑件_v0.1
基本环境:
- VScode + PlatformIO
- 下载代码
git clone https://github.com/SmallPond/D-BOT
-
编译 && flash
-
首次启动
- 配置 WiFi,连接 DBOT_xxx 的 WiFi,访问 192.168.4.1 进入网页配置并保存,D-BOT 将会自动重启
- 启动后会自动进行陀螺仪(MPU6050)自动校准和电机自动校准(左右电机依次顺逆时针转动);如果你在完全固定组装前启动过,电机将可能不会再校准导致电机工作不正常;
- 强制校准方法:在启动听到“叮”一声后,立马按住 boot 键(主控板最外侧的按键)2 秒不动,等待一会应该能看到电机开始校准;或者直接 0 地址重刷 merge 固件,这将清除所有配置。
- 因为 mpu6050 不是直接板载在主控板的,焊接的差异可能导致平衡(机械)中值有差异,可以通过无线调参修改,有能力的同学也可以直接修改代码后重新编译;
- enjoy
D-BOT 的 AI 控制代码开源在 xiaozhi-esp32 仓库,当前仅优先支持 45coll-sparkbot 开发板。
如果你有其他版本的小智,可以在 xiaozhi-esp32 的 issue 里提交申请,详细描述板子型号。我统一支持后发 release 固件。当然有能力的同学也可以参考我的修改自行增加其他开发板的支持。
当前手柄遥控仅支持和我同款的手柄,库开源在ESP32 解析蓝牙手柄信号。X-Box 理论上可以使用其他库解析。
- 以 L + Home 方式启动手柄;
- 通过小程序“谷雨蓝牙”扫描出手柄蓝牙,获取蓝牙地址,类似 “04:0A:11:11:90:10”。我现在打开这个工具扫描出来的是 UUID 形式的,应该需要改代码,或者通过其他方法获取上述格式的蓝牙地址,有能力的同学可以再研究下。
- 刷 D-BOT v0.2 及其以上版本固件,在配网界面填入蓝牙地址;重启后打开手柄就能自动连接;
- D-BOT 默认为 AI 控制模式,按下 A 键切换为遥控模式后,即可通过摇杆控制。
- 配置 SimpleFOCStudio基本环境 ;
- 通过串口获取 D-BOT 启动日志打印的 IP 地址;
- 在 SimpleFOCStudio 界面中配置 IP 和端口号(默认为 4242),连接成功后,在 Command Line interface 处输入以下指令调参;
| 对象 | 命令 | 示例 |
|---|---|---|
| 直立环 | S | SP0.2——直立环 P 项设置为 0.2, SP不带参数则为获取当前 P 项 |
| 速度环 | V | VP0.2——速度环 P 项设置为 0.2 |
| 转向环 | T | TP0.2——转向环 P 项设置为 0.2 |
| D-BOT 前后移动闭环控制 | R | RP0.2 |
| D-BOT 转向闭环控制 | B | BP0.2 |
| 机械中值 | X | X-3——机械中值设置为 -3(默认值为 -2,正常直立时 D-BOT 向前走,应该减小该值) |
| 保存所有参数 | C | C |
- Super_Balance: 手工饭开源平衡车;本项目的结构和小车平衡控制主要参考此项目