Important
🌟 Stay up to date at opendrivelab.com!
Joint effort by Shanghai Innovation Institute (SII) and OpenDriveLab at The University of Hong Kong.
- MTGS leverages multi-traversal data for scene reconstruction with better geometry.
- We conduct a robust pipeline to calibrate and reconstruct the nuPlan dataset with multi-traversal data, which is widely used in the autonomous driving community. See downstream applications in NAVSIM v2 and SimScale.
- We integrate a web viewer from nerfstudio to visualize the reconstructed scene and switch nodes between different traversals.
- Getting started with our codebase now! 🚀
- [2026/01/27] Auto reconstruction pipeline released! Scalable multi-GPU/multi-node reconstruction for large-scale datasets. Check it out!
- [2025/05/29] We release the checkpoints. Check it out!
- [2025/05/27] Official code release.
- [2025/05/14] Video demo release.
- [2025/03/16] We released our paper on arXiv.
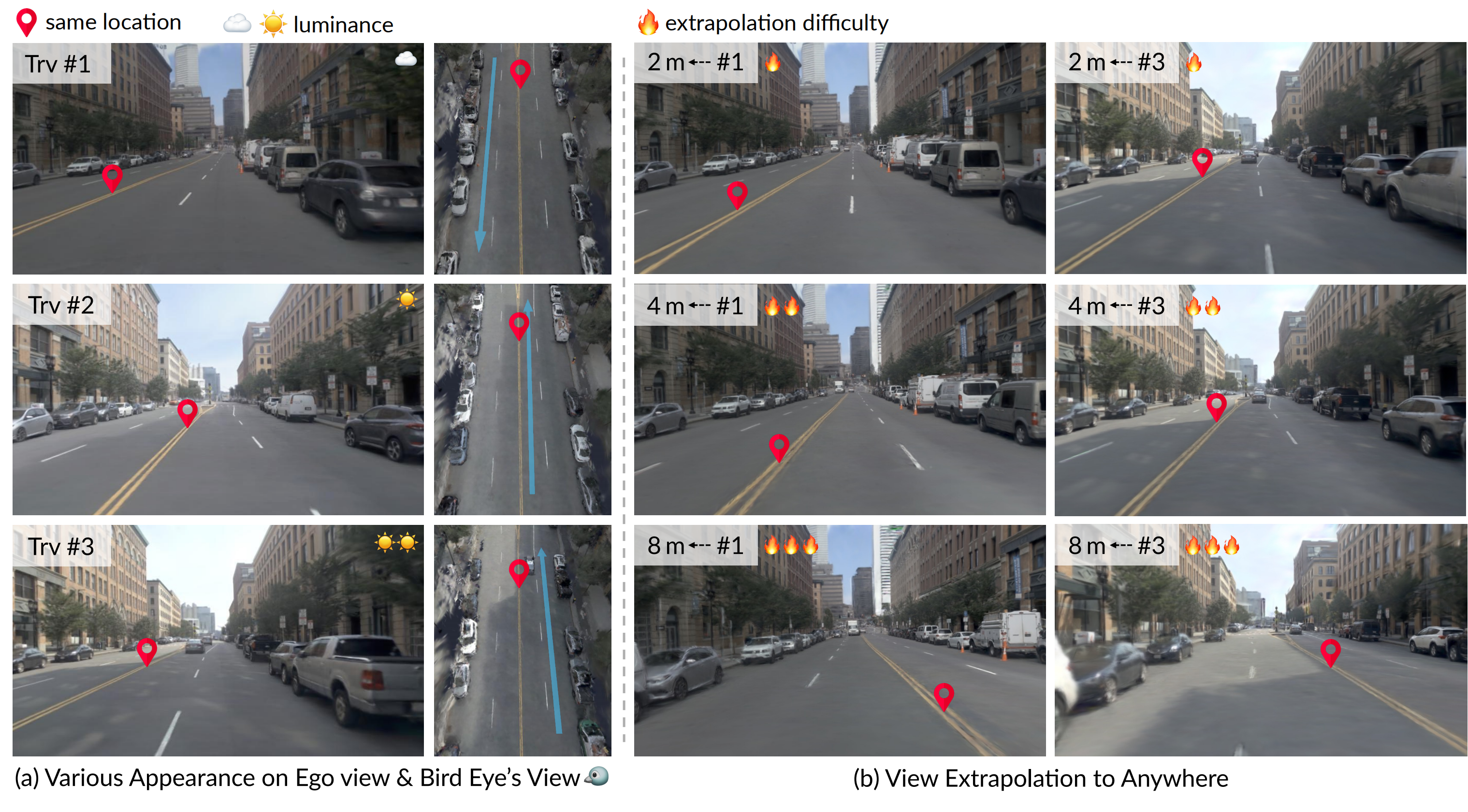
All the videos below are reconstructed and rendered with our method, MTGS, from road_block-331220_4690660_331190_4690710.
Rendered results on training traversals 1, 2, and 3, from top to bottom.



Novel-view results on the testing traversal.

- Official code release.
- Release the checkpoints.
- Auto reconstruction pipeline for large-scale datasets.
- Simulation environment with reconstructed assets.
- Demo page.
- 📦 Installation
- 📊 Prepare Data
- 🚀 Running
- ⚡ Auto Reconstruction - Scalable multi-GPU/multi-node pipeline for large-scale datasets
If any parts of our paper and code help your research, please consider citing us and giving a star to our repository.
@article{li2025mtgs,
title={MTGS: Multi-Traversal Gaussian Splatting},
author={Li, Tianyu and Qiu, Yihang and Wu, Zhenhua and Lindstr{\"o}m, Carl and Su, Peng and Nie{\ss}ner, Matthias and Li, Hongyang},
journal={arXiv preprint arXiv:2503.12552},
year={2025}
}All content in this repository is under the Apache-2.0 license. The released data is based on nuPlan and are under the CC-BY-NC-SA 4.0 license.
We acknowledge all the open-source contributors for the following projects to make this work possible:
| Project | Description |
|---|---|
| A collaboration friendly studio for NeRFs | |
| CUDA accelerated rasterization of Gaussian Splatting | |
| Driving scene reconstruction toolkit | |
| A simple and effective LiDAR odometry pipeline | |
| Accurate monocular metric depth estimation |