This repository contains all the algorithms (SVM classifier and infrastructure change detection) used to produce the results in the paper I have co-authored with the title:
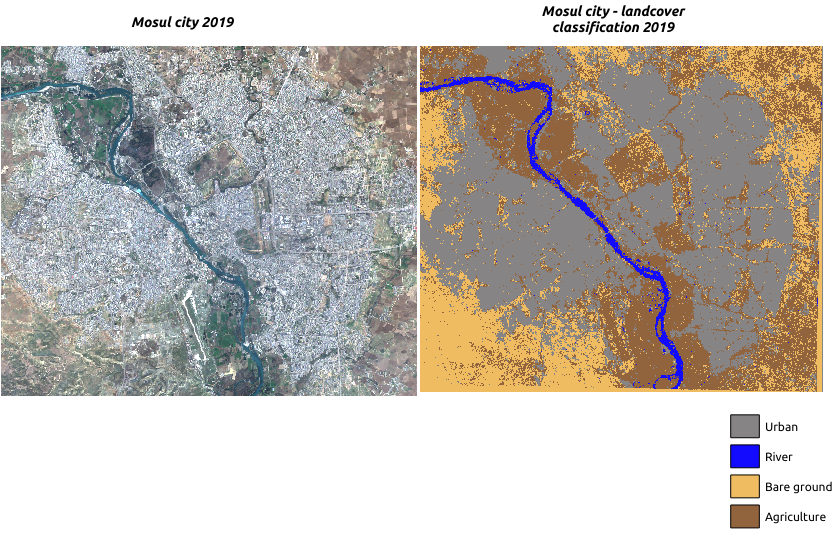
Fakhri,F., Gkanatsios,I 2021. Integration of Sentinel-1 and Sentinel-2 data for change detection: A case study in a war conflict area of Mosul city, Remote Sensing Applications: Society and Environmen, 22
Create virtual environment
$ mkdir svm
$ cd svm
$ pipenv --python 3
$ pipenv install -r path/to/requirements.txt
SVM classification
usage: SVM.py [-h]
[-o OUTDIR]
[-i INPUTRAW]
[--train TRAIN]
[--tune]
[--cpu CPU]
[--pca]
optional arguments:
-h, --help show this help message and exit
-o OUTDIR, --outdir OUTDIR
Specify an output directory
-i INPUTRAW, --inputraw INPUTRAW
Provide a path to the raw data
--train TRAIN Provide a path to the training data. A different shapefile for each landcover class
for instance, for the following 3 classes: urban, river and crops, we should have 3
shapefiles: urban.shp, river.shp and crops.shp
--tune Tune the model to choose the optimum hyperparameters
--tunetype TUNETYPE Select a method for tuning the SVM model. THe two optios are grid or random grid method exhoustively
search all the values that have been defined and trains the model for every possible combination.
random method uses a sample of the values provided which makes the optimization process much faster
--cpu CPU Select the number of CPUs to be used during processing. if --cpu all passed as an argument then the computer uses all the CPU cores for
processing. If --cpu int passed as an argument then the computer uses the number of cores specifed by the user
--pca Performs dimensionality reduction based on the PCA algorithm
usage: infrastructure_loss.py [-h]
[--out_image OUT_IMAGE]
[--before BEFORE]
[--after AFTER]
optional arguments:
-h, --help show this help message and exit
--out_image OUT_IMAGE
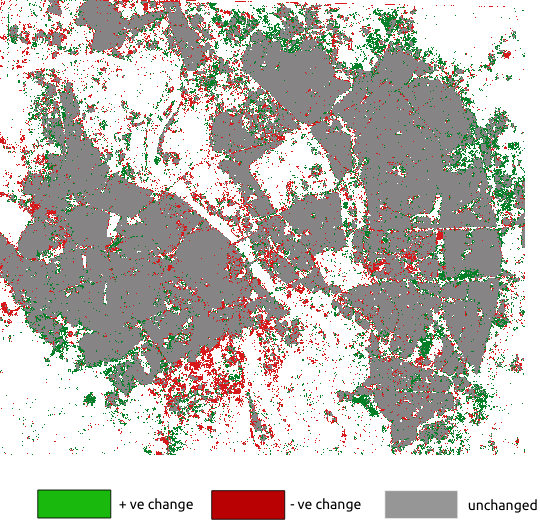
It outputs the change detection map. It shows the infrastructure loss and gain values of -1 shows
the loss and values of 1 show the gain
--before BEFORE Provide a path to the data before the event. This is the reference image
--after AFTER Provide a path to the data after the event. This is the second image that is used to
estimate the change in comparison with the first one
Building change detection beteen 2015 and 2019
MIT